

1. SLAM 激光导航
SLAM 的导航原理:SLAM(Simultaneous Localization And Mapping)即同步定位与建图,指在未知的环境中,AGV 机器人通过自身所携带的内部传感器(编码器、IMU 等)和外部传感器(激光传感器或者视觉传感器)来对自身进行定位,并在定位的基础上利用外部传感器获取的环境信息增量式的构建环境地图。
基于环境自然导航的 SLAM 激光导航 AGV 中,机器人在运动过程中通过编码器结合 IMU 计算得到里程计信息,运用机器人的运动模型得到机器人的位姿初估计,然后通过机器人装载的激光传感器获取的激光数据结合观测模型(激光的扫描匹配)对机器人位姿进行精确修正,得到机器人的精确定位,较后在精确定位的基础上,将激光数据添加到栅格地图中,反复如此,机器人在环境中运动,较终完成整个场景地图的构建。
在完成场景地图构建后,需要在所构建的地图基础上进行基于地图的位置和路径规划来实现激光 AGV 的导航。SLAM 激光导航AGV 运动过程中,通过里程计信息结合激光传感器获取的激光数据与地图进行匹配,不断地实时获取 AGV 在地图中的精确位姿,同时,根据当前位置与任务目的地进行路径规划(动态路线或者固定路线,且每次的路线都略微不同),根据规划得到的轨迹给 AGV 小车发送控制指令,使 AGV 小车实现自动行驶。
1.1. 激光无反导航(自然导航)
自然导航是通过激光传感器扫描感知周围环境。与激光导航不同的是,不需要在 AGV 行驶路径的周围安装用于定位的反光柱,自然导航的定位标志物可以是工作环境中的墙面、物体等信息。相比于激光反光板导航,自然导航的施工成本与周期都较低。但自然导航受环境以及光线影响较大,要求在激光扫射平面内无较大范围的环境变化,环境变化率<30%,玻璃、不锈钢等易反射物体会对其导航定位有较大影响。激光无反导航示意如下图 1.1-1 所示:

图 1.1-1
1.2. 激光有反导航
激光反光板导航是在 AGV 行驶路径的周围安装位置精确的反光柱,激光扫描器安装在 AGV 车体上。激光扫描器随 AGV 的行走的同时发出激光光束,发出的激光光束被沿 AGV 行驶路径铺设的多组反射柱直接反射回来,触发控制器记录旋转激光头遇到反射柱时的角度。控制器根据这些角度值与实际的这组反光柱的位置相匹配,计算出AGV 的绝对坐标,基于这样的原理实现非常精确的激光导引,建议环境变化率≥30%使用。
激光有反导航示意如下图 1.2-1 所示:

图 1.2-1
2. 部署要求
2.1. 材质要求
反光柱的反光膜型号采用专用 3M DG3。如图 2.1-1 所示,反光柱呈圆柱状,直径Φ76mm,具体长度依据现场应用场景的 AGV 导航激光安装高度而定。反光模长度 400mm,中心对准激光扫码器的光源。
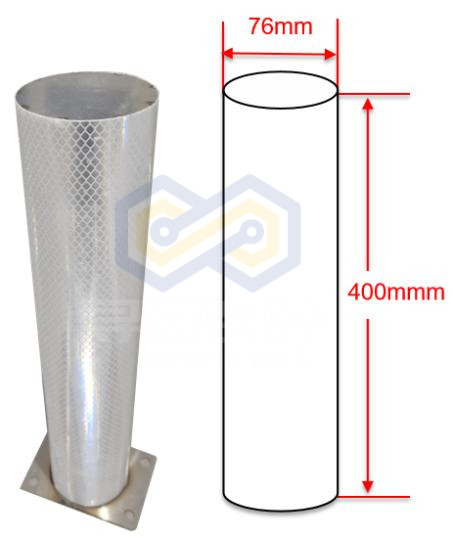
图 2.1-1 反光柱
2.2. 安装方式
反光柱应安装在 AGV 行驶路线的两侧。可直接安装货架或其他固定设备表面或地面,也可把反光膜直接安装与圆柱状设备表面。若激光雷达扫描范围内无适合的固定立面安装反光柱时,可采用加高立柱安装,立柱。可根据甲方现场实际情况进行多种方式的安装,可安装墙面、立柱表面、固定设备的外表面,也可订做专用支架进行安装等方式。
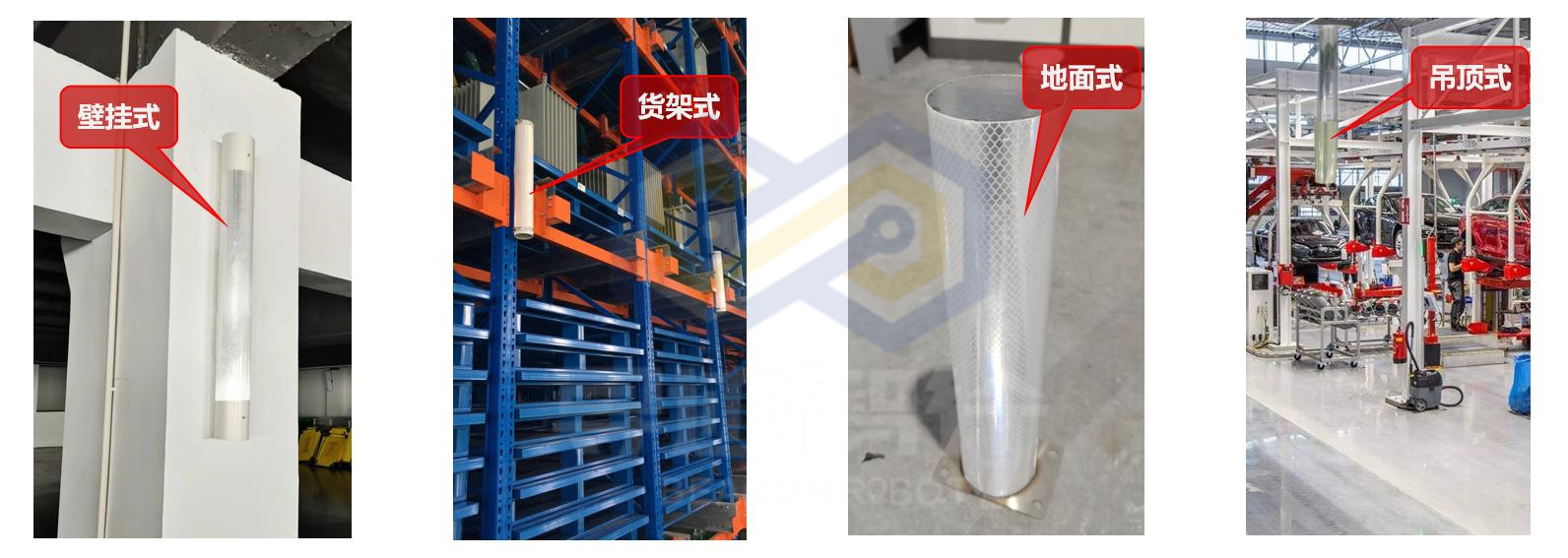
图 2.2-1 安装方式
2.3. 部署准则
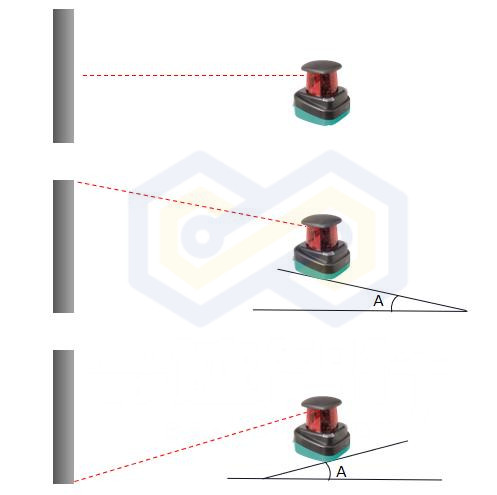
图 2.3-1 地面与反光柱
如图 2.3-1 所示为工厂地面与反光柱相对关系,第一张图为导航激光水平线与地面夹角为 0 度,激光可以垂直射向反光柱,并垂直反射,此种反射效果最好,但实际客户现场多数为第二或第三种情况,导航激光与地面成一个角度,此时应先对应用地面进行水平度测量,对每段路面都要测量,测量出角 A 的值后,需严格按照如下准则铺设反光柱:
①遇到非水平路面点需测量水平成角 A 的值,根据反光柱与激光的距离算出反光柱应该安装的高度;
②当反光柱安装高度确定时,又遇到地面不平的情况应延长反光柱或两个叠加垂直安装;
③反光柱在有效扫码范围之内与激光扫描仪之间不可被遮挡;
④在运行路线任意位置须确保以无人叉车为中心的 X、Y 轴四个象限最少有 4 个反光柱生效(最优为 6 个);
⑤反光柱安装高度为反光柱中心与无人叉车激光扫描仪的中心保持一致;
⑥反光柱之间在俯视平面图上宜交错、无规则化,禁止等间距、镜像部署;
⑦若现场设备表面对反光柱有投影影响,需在影响区域进行遮挡处理;
2.3.1. 全场景部署
无人叉车 AGV 所行驶的路线区域,按照规则全部署,反光柱之间间距为 4m 最优,最大不超过 5m,如下图 2.3.1-1 所示:
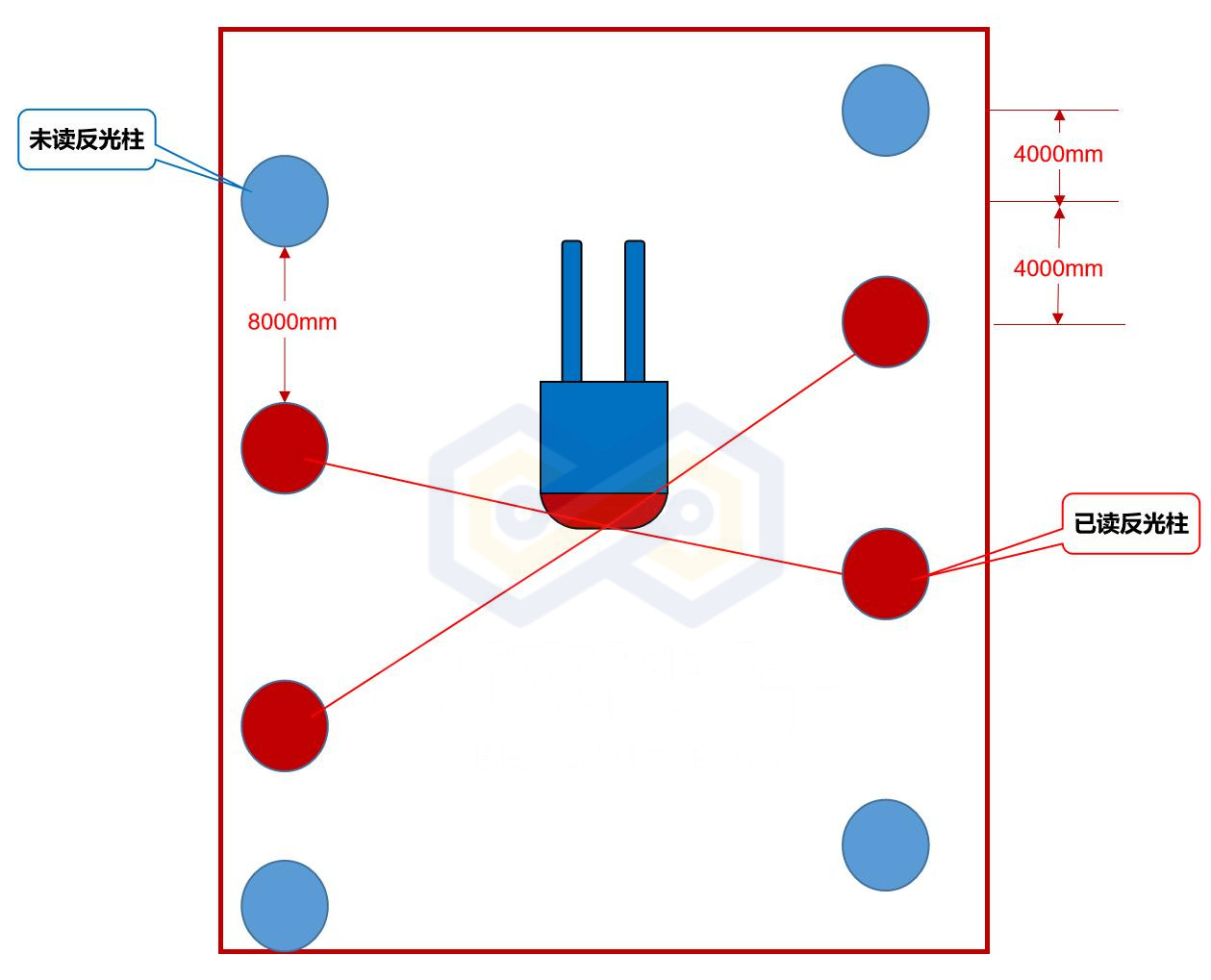
图 2.3.1-1 全局部署
2.3.2. 局部场景部署
无人叉车 AGV 所行驶的路线区域,把区域划分各个小区域进行部署,区域内范围 12m 以内,无规则部署 4 个反光柱,反光柱之间的间距 4m 最优,最大不超过5m,。区域间间距 15m,如下图 2.3.2-1 所示:
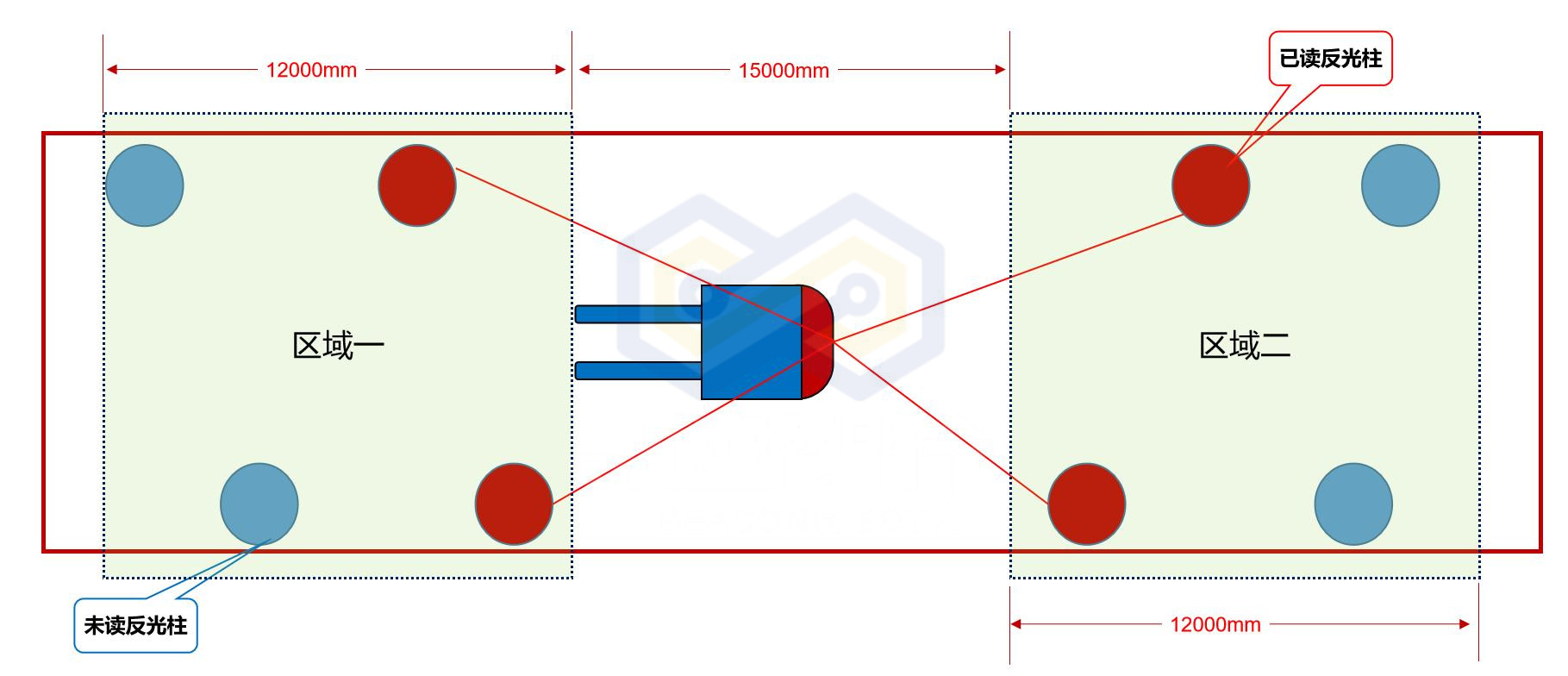
图 2.3.2-1 局部部署
2.3.3. 其他
上述反光柱布局规则为理论计算,最终结果根据实际现场环境为准。
产品优势
PRODUCT ADVANTAGES
快速部署
基于SLAM激光导航技术,无需进行现场场景改造,自主生成导航定位地图,实现系统快速部署。
自我检测
实时获取机器人状态,实现机器人状态自检、异常告警及快速诊断。
拓展快速
预留企业第三方系统标准对接端口,可根据需求快速实现对接,搭载功能应用模块。
自动充电
系统实时电量检测,触发阈值后自动充电/断电,实现7*24全天不间断工作及快速高频响应任务。
安全防护
搭载激光雷达,360°安全防护检测,三级安全减速,智能识别障碍物,主动停车或更换线路。
灵活调度
基于自研系统,实现机器人大规模群控,智能上下线,保证系统稳定高效运转。



